首页
关于我们
关于我们
产品中心
高空特种机器人
风电场智能运维机器人
工业机器人及自动化设备
特种检测机器人
仿生机器人
资讯中心
资讯动态
招贤纳士
招贤纳士
在线留言
在线留言
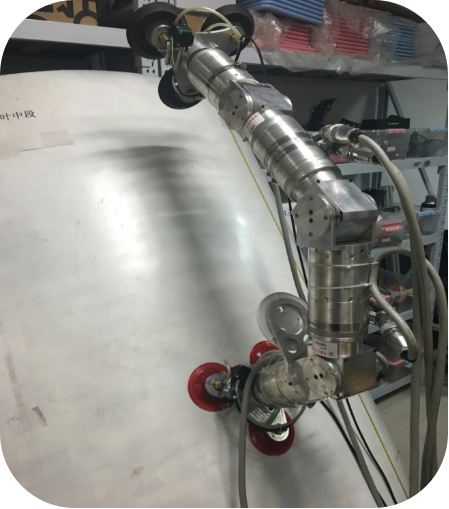
仿尺蠖机器人
来源:
未知
日期:
2026-03-31 15:56
浏览:
基于几何方法分析吸盘足和机构对圆弧曲面的适应性。
采用CPG(中枢模式发生器)对机器人叶片曲面攀爬步态进行规划。
建立遥控轴与机器人运动映射关系,实现机器人遥操作。
采用模块化电机设计思想,分别设计仿尺蠖机器人的T关节和I关节。
自适应RBF神经网络补偿计算力矩控制,提高机器人关节轨迹跟踪精度。
0
上一篇:
磁吸附爬壁作业机器人
下一篇:
爬壁机器人
首页
电话
短信
联系
 基于几何方法分析吸盘足和机构对圆弧曲面的适应性。
基于几何方法分析吸盘足和机构对圆弧曲面的适应性。